We hope to setup a large-scale robotic application benchmark for LiDAR semantic segmentation task. We collect a total of 38904 frames of hybrid-solid LiDAR data in different substations through an industrial robot and have annotated
25 categories.
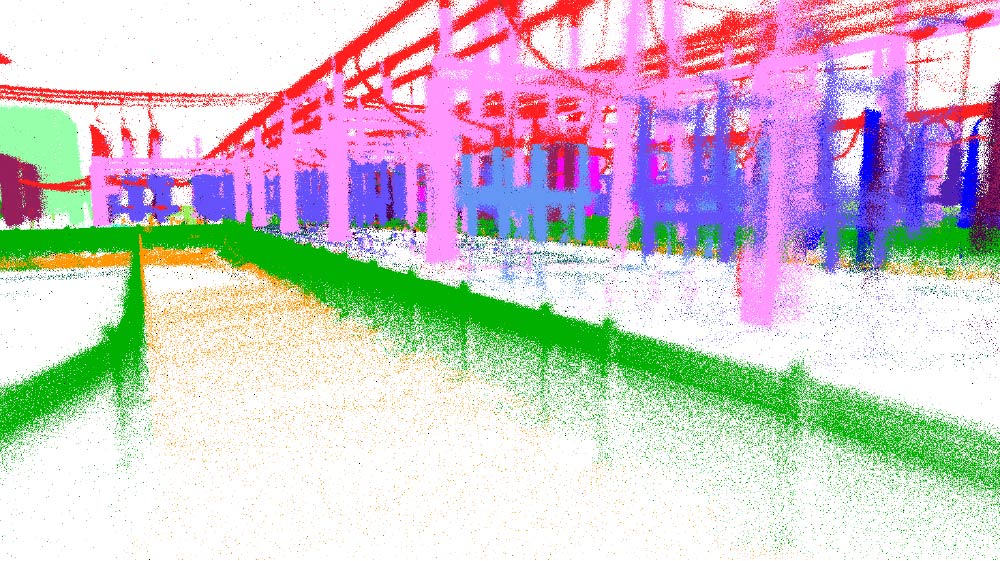
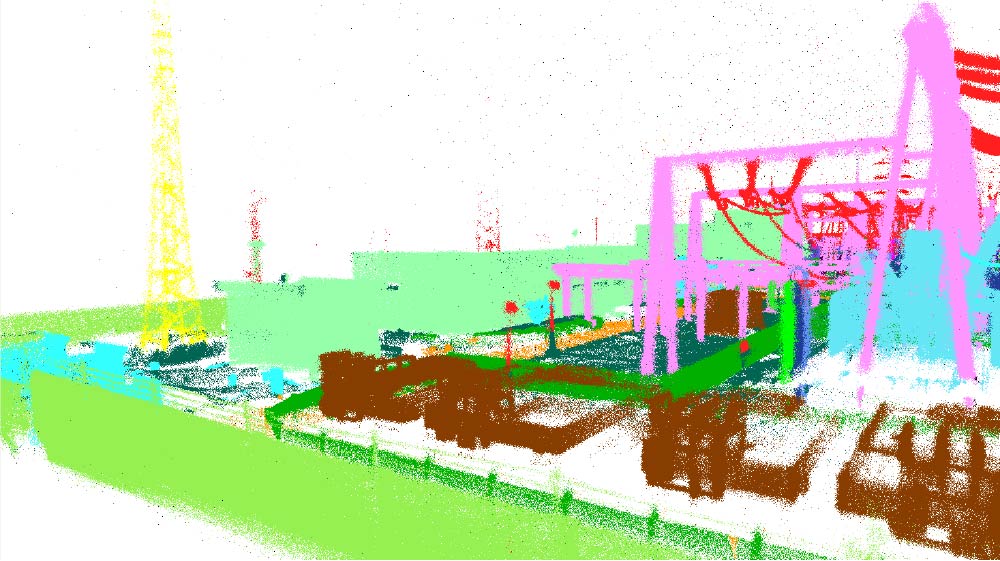
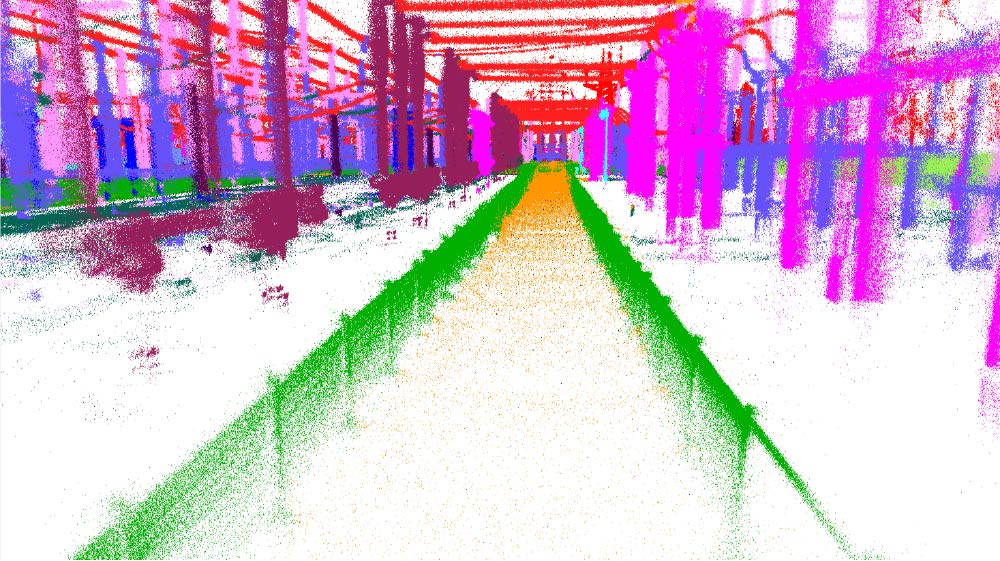
Example of labeled cumulative point clouds in S.MID.
Semantic LiDAR dataset comparison. Frames † for train/val/test. Number of classes ‡ for single frame evaluation and annotated total number in brackets.
Datasets
Frames †
LiDAR
Types of LiDAR
Classes ‡
Applications
nuScenes
28130/6019/6008
Velodyne-HDL-32E
Mechanical Spinning LiDAR
16 (32)
Autonomous Vehicle
SemanticKITTI
19130/4071/20351
Velodyne-HDL-64E
Mechanical Spinning LiDAR
19 (34)
Autonomous Vehicle
S.MID
13101/5000/20803
Livox Mid-360
Hybrid-Solid LiDAR
14 (25)
Industrial Robot
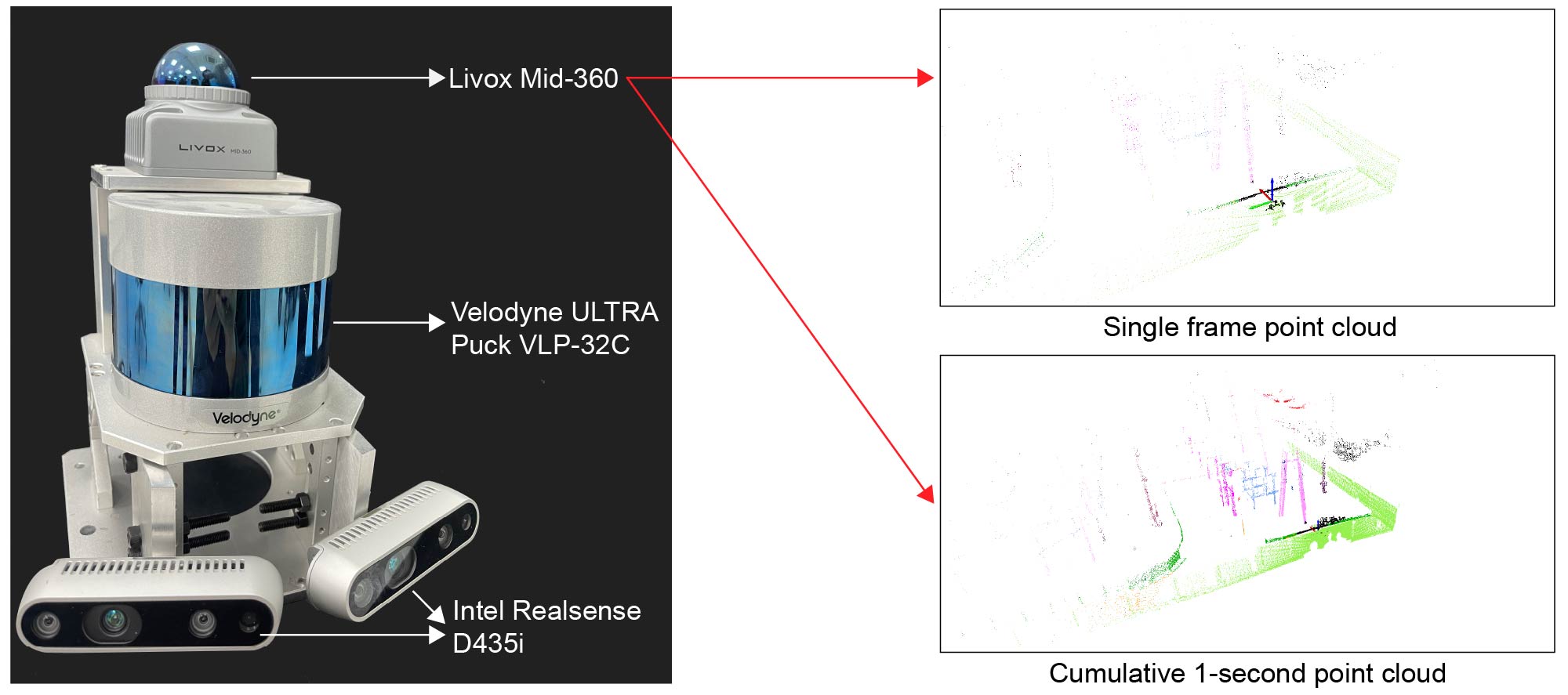
Sensors
Figures below show the sensors equipped on our industrial robot used to collect S.MID. Please note that only data collected by Livox Mid-360 and the corresponding labels are released with SMID_beta_v1_2 and SMID_v1_3.
Livox Mid-360 is suitable for industrial robots involving scene understanding tasks since it covers a broader range of scenes with non-repetitive scanning mode. However, it is a double-edged sword. This mode will also make the point
cloud relatively sparse and randomly distributed. Therefore, the single-frame hybrid-solid LiDAR segmentation task brings more challenges to network design. (More details can be found in our paper
).
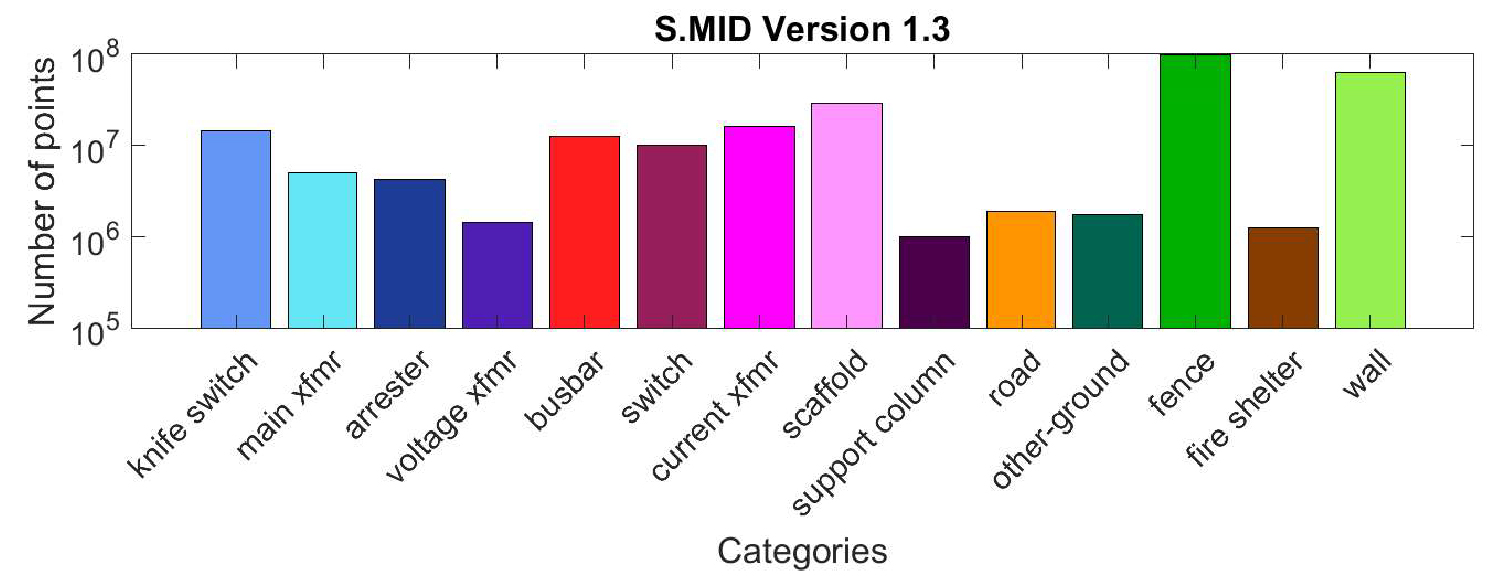
Label distributions
For single-frame segmentation task, we merge the annotated labels into 14 classes (knife switch, main transformer, arrester, voltage transformer, busbar, switch, current transformer, scaffold, support column, road, other-ground,
fence, fire shelter, wall). The imbalanced count of classes is common in substation scenes. Hence, similar to imbalanced class distributions observed in autonomous driving datasets, addressing the issue of imbalanced class
distribution in S.MID is an integral aspect that methods must contend with.
Folder structure and format
Similar to SemanticKITTI, we provide for each scan XXXXXX.bin
of the hybrid folder, a file
XXXXXX.label
in the labels folder that contains for each point a label in binary format. The label is a 32-bit unsigned integer (aka uint32_t) for each point, where the lower 16 bits correspond to the label. You can go to our
project page to learn more about how to load our dataset.